


The Future of Ocean Exploration
Oceanographers have driven the widespread use and acceptance of robotic and autonomous systems in the marine environment. These platforms transform our monitoring capability through autonomous, adaptive and persistent observations from the sea surface to the deepest depths and furthest reaches of the oceans.
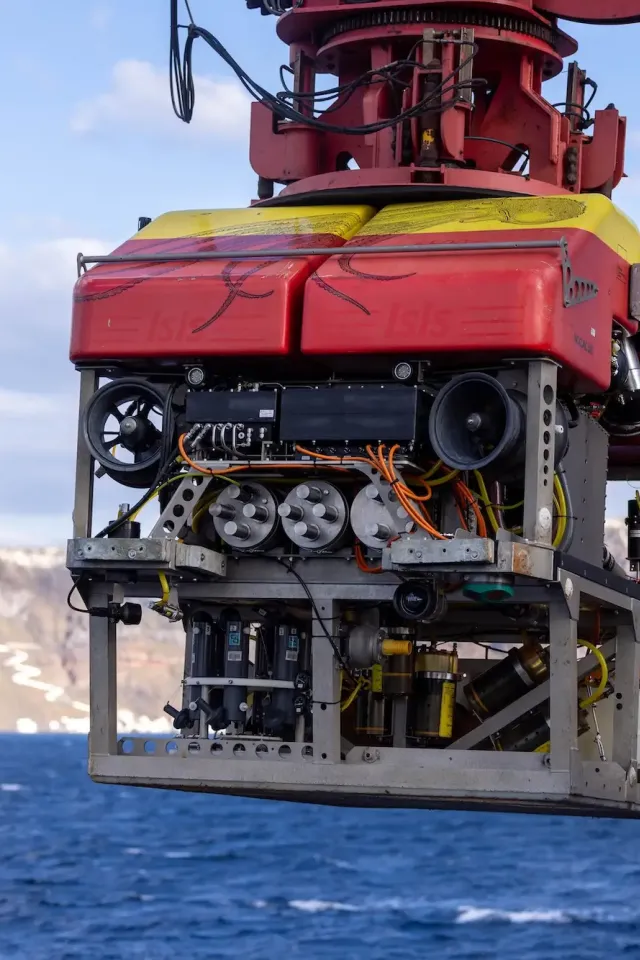
The Marine Autonomous and Robotics Systems (MARS) team at NOC designs, builds, and operates a world-class fleet of underwater robots, including Autonomous Underwater Vehicles (AUVs), Gliders, and Remotely Operated Vehicles (ROVs), to advance marine scientific research. The fleet is one of the largest and most advanced in the world, and alongside working with the research ships NOC operates the fleet explores some of the ocean's most remote areas.



NOC's Marine Technology Capabilities
Today, NOC's abundance of world-leading technology allows society to advance our knowledge of the ocean on a worldwide scale. Their growing capability has transformed our ability to monitor the oceans by enabling autonomous, adaptive and persistent observations from the surface to the deepest depths and furthest reaches of the oceans.