


What Are Autonomous Underwater Vehicles?
Autonomous Underwater Vehicles, or AUVs, are essentially robot submarines that explore the world's oceans without a pilot or any tether connecting them to a surface vessel. Unlike remotely operated vehicles that require constant human control through an umbilical cable, AUVs operate independently. They follow pre-programmed missions or adapt their behaviour based on what they encounter in real time.
The National Oceanography Centre has developed two complementary Autosub systems that work in different ways but share a common purpose. The Autosub Long Range has been designed to provide measurements of ocean and seabed properties over vast ocean scales, transmitting data back to scientists via an Iridium satellite without needing a research ship nearby. Meanwhile, Autosub 5 operates as a high-power, ship-launched platform that can image the seabed in extraordinary detail and integrate new sensors in a modular fashion, including NOC's own RoCSI sensor for environmental DNA sampling. Both systems can dive to depths of 6,000 metres, giving them access to the vast majority of the ocean floor.
How do Autosubs Extend our Research Capabilities?
The Autosubs enhance what we can achieve in ocean research through two fundamentally different but complementary approaches. On one hand, they extend the capabilities of our research vessels in deep waters by providing much higher-resolution seabed imaging and more detailed ocean measurements within the water column than the ships themselves can gather. Whilst vessels provide essential platforms for deploying instruments and supporting research teams, the Autosubs can dive deeper, stay underwater longer, and access confined or hazardous areas that ships simply cannot reach safely.
On the other hand, and perhaps more transformatively, the Autosub Long Range's 2,000-kilometre range enables these systems to undertake underwater science with a dramatic reduction in carbon dioxide emissions compared with the much larger research vessels that would otherwise be required. This capability fundamentally changes what's possible. It means we can conduct sustained observations in remote ocean regions without the cost, time, and environmental impact of maintaining a ship on station for weeks or months. Rather than choosing between ship-based and autonomous research, we're learning to use each approach where it works best, creating a more flexible and sustainable research capability.

Autosub Long Range
Autosub Long Range represents something of a breakthrough in autonomous ocean observation. With its 2,000-kilometre range, it can undertake missions spanning weeks at a time, covering distances that would otherwise require substantial ship time and fuel consumption.

Autosub 5
Autosub 5 has been designed as a high-power, ship-launched platform for detailed investigation of the seafloor and water column. Its advanced sonar and camera systems capture extraordinarily detailed views of the seabed and the marine life living there, whilst its modular design means we can accommodate new sensors as they're developed.
Technological Advances
The vehicles rely on sophisticated navigation systems that combine acoustic beacons, inertial navigation, and continuous seafloor mapping to maintain precise positioning underwater where GPS signals cannot penetrate.
The obstacle avoidance systems use advanced sensors and algorithms that enable safe operation in complex terrain, whether navigating around coral mounds or through submarine canyon walls, making split-second decisions about the safest path forward.
Energy management systems combined with intelligent mission planning maximise how far the vehicles can travel and how long they can stay deployed. Perhaps most importantly, the vehicles can make autonomous decisions based on what they encounter, adapting their behaviour to optimise data collection without waiting for human instructions that might take hours to arrive.
History of Autosub Development

Origins - Wormley, Surrey
The development of Autonomous Underwater Vehicles (AUVs) and their technological and scientific applications began at the Natural Environment Research Council’s (NERC) Institute of Oceanographic Sciences (IOS) based in Wormley, Surrey.
Doggie and Dolphin - University College, London
By April 1987, there was an outline plan for two vehicle concepts: DOGGIE (Deep Ocean Geological and Geophysical Instrumented Explorer) and DOLPHIN (Deep Ocean Long Path Hydrographic INstrument).
Preparations - Wormley, Surrey
Technology developments arose from multiple Autosub Science Workshops, and staff spent time building up their expertise through working on designs and prototypes while also managing a series of contracts with industry, universities and defence laboratories.

Securing Funding - Southampton Oceanography Centre
In the final few years at Wormley, the programme experienced some turbulence. Following the fourth Autosub Science Workshop held in Southampton in December 1995, the perfect test tank was identified directly outside the Southampton Oceanography Centre.

The First Mission - Southampton Empress Dock and Portland Harbour
In June 1996, Autosub 1 ventured out of the lab for the first time and into Empress Dock at the NOC in Southampton to undergo an exhaustive series of tests which included testing all technological systems and on-surface manoeuvres. Following this it set sail in Portland Harbour where it completed a 3.6-km mission, supported by the catamaran Top Cat, which included surfacing positions and GPS fixes.

The Calanus Dive – Firth of Lorne, Ardmucknish Bay
The first demonstration of extended survey type missions, leaving Dunstaffnage Bay and navigating autonomously through the channel that was just 130 metres wide at the narrowest point between the mainland and Eilean Mor.

American Adventure – Fort Lauderdale, Florida
Autosub travelled to Florida for a series of missions between the Florida Current and the Florida coast, unintentionally becoming the first unaccompanied Autosub mission after making faster progress than the support boat.

The Autonomous Vehicle Validation Experiment – Bermuda
Autosub 1 was equipped with sensors from Chelsea Instruments, SeaBird CTDs and a state-of-the-art turbulence probe that attached to the nose of the vehicle. This turbulence probe was provided by Dr Manhar Dhanak's group at Florida Atlantic University.
LARS Debut – Oban, Scotland
These trials were in preparation for ‘Autosub Science Missions’, a thematic programme created and funded by NERC. This mission was the first to include a LARS (Launch And Recovery System), which meant Calanus, the support vessel, needed to be loaded with extra ballast in order to ensure stability.

New Vehicle for a New Programme
In preparation for the conclusion of ‘Autosub Science Missions’, a new and ambitious thematic programme was developed, named ‘Autosub Under Ice’ (AUI). This programme would focus on Antarctic and Greenland ice shelf deployments.

Under Sea Ice and Pelagic Surveys – The North Sea
Autosub 2 was deployed to the North Sea on the Fisheries Research Vessel Scotia. Uniquely, deployment and recovery were through an opening in the side of the vessel to a space known as the 'hanger', through which the gantry could still be used.

Biology, Physics and Chemistry – Celtic and Irish Seas
Autosub 2 became the first AUV to carry a Flow Cytometer – an optical instrument to characterise single phytoplankton cells and particles using light scatter and fluorescence. The experimental Cytosub was produced by Cytobuoy NV of the Netherlands.

Stuck in Sicily – Strait of Sicily
During Mission 240, while deployed on the Italian research vessel Urania, the vehicle became stuck under an overhang while terrain-following close to the bottom of a steep cliff.

Science Museum Exhibition – The Science Museum, London
The Autosub programme was part of a major exhibition surrounding robot submarines. On display were: model of Autosub 2 suspended from the ceiling, an ARGO profiling float, interactive Autosub displays on computer screens, and images from the recent Oban mission.

Braving the Elements – Antarctica
This was the first Polar mission for the Autosub team. Some incredible locations were visited, including the ice edge in the Weddell Sea, Drake Passage and the Falkland Islands.

Oceanology International – ExCel Centre, London
The stand at the Oceanology International Exhibition was co-curated by the Autosub team and featured Geosub as well as a working model of the Autosub gantry used in multiple previous missions.

Autosub Under Ice – Bransfield Strait, Antarctica
The Autosub team again braved snow and ice onboard RRS James Clark Ross. Due to heavy ice, the cruise was unable to reach its intended working area, the Pine Island Glacier, and instead Autosub was used on multiple under sea ice missions.

Muddy Nose – South West Approaches
Due to severe problems during the 2003 Autosub Under Ice cruise determined to be caused by design weaknesses in the commercial underwater connectors, Autosub 2 underwent a major rebuild.

To the Arctic – Courtauld Glacier
In 2004, Autosub 2 undertook two cruises aboard RRS James Clark Ross in the Arctic. Wings were added to the rear half of the centre section of the vehicle to improve surface diving. The vehicle successfully executed several under sea ice missions.

Missing in Action – Fimbulisen Ice Shelf, Antarctica
The major milestone of this campaign was Autosub 2’s first successful under ice shelf mission, taking place at the daunting Fimbulisen Ice Shelf in Antarctica. This campaign was part of the NERC Autosub Under Ice thematic programme, led by Dr Keith Nicholls from the British Antarctic Survey.

Dynamics of Shelf Seas Fronts – The Irish Sea
Autosub operations were from MV Terschelling in the Irish Sea off the North Wales coast with a total AUV mission track of 751 km. The longest mission covered 214km over the ground in 60 hours in a high tidal regime.

Autosub6000 – South West Approaches
In September, Autosub6000 had its first deep water trial aboard RRS Discovery as part of cruise D323. Led by Steve McPhail, the vehicle on its second mission dived to 4500 metres below sea level and stayed there for 90 minutes.

Gathering Samples – Horseshoe Abyssal Plain and Lower Whittard Channel
The vehicle took part in a number of missions studying deep-sea scours, including providing insights into scour morphology, mapping a giant scour within a broad channel fed by the Lagos & Portimao Canyons, and targeting an area of overbank sediment waves and associated scours across the lower Whittard Channel.

Visit to the Pine Island Glacier – Pine Island Glacier, Antarctica
Under the NERC Under Ice thematic programme, Autosub 3 undertook six mission under the Pine Island Glacier, with 167 hours under the Glacier covering a whopping 510km in total. The cruise was aboard the RV Nathaniel B. Palmer, a twin-screw vessel with a cut-away counter.

Deep-Water Trials Map Seamount – Casablanca Seamount
Autosub6000 continued to take part in deep-water trials in preparation for future missions. This time testing a new obstacle avoidance system and low altitude operations in preparation for seabed photographic surveys and operations in rugged terrain.

Discovering Hydrothermal Vents – Cayman Trough
As part of an International Interridge Programme cruise, Autosub6000 was tasked with studying ultra-deep hydrothermal vents. The AUV was equipped with an electrochemical Eh sensor provided by Dr Koichi Nakamura, National Institute of Advanced Industrial Science and Technology, Japan.

Flow Dynamics – Strait of Istanbul
Autosub 3 travelled to Turkey to take part in a NERC-funded cruise led by Professor Jeff Peakall of Leeds University to study flow dynamics in the Bosphorus, also known as the Strait of Istanbul. The work was carried out just north of the Bosphorus.

Autosub Long Range – Atlantic Ocean
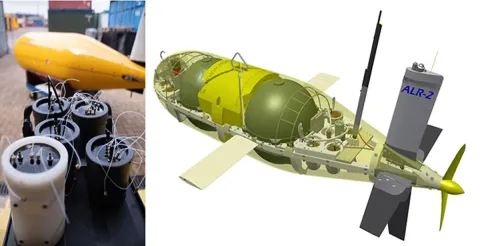
The Autosub Long Range AUV (or ALR) was a new type of AUV with a depth rating of 6000m. Although a third the weight of the Autosub 3 and the Autosub6000 AUVs, it is able to travel greater than ten times the distance and can be deployed for months at a time.

Photography Mission – Darwin Mounds, Scotland
In operation on the RRS James Cook, Autosub6000 took part in an expedition to study benthic habitats and human impact in the Rockall Trough, Rockall Bank and Hatton Basin. Unfortunately for the most part, the weather was atrocious!

Sea Creature Encounter – Eastern North Atlantic
Autosub6000 took part in this Ecological Sampling and Surveying cruise utilising a new vehicle-mounted photographic system designed by the AUV team. The photographic system consisted of twin camera and flash units, one oblique forward-looking the other vertical, and a dedicated logging processor.

Surveying Success – Norway
Aboard the RRS James Cook, Autosub6000 took part in a long surveying mission. The vessel was fitted with a brand new AUV Launch And Recovery System (LARS) on its afterdeck as an upgrade to the existing LARS.
Shore Command – Gran Canaria
From 20 January – 15 March 2013, the NOC carried out a series of ALR trials with a base at the Spanish oceanographic research facility (PLOCAN). The trials were a success, with much learnt about the characteristics of the vehicle.

Submarine Channel Flow Dynamics – The Black Sea
The primary aim of this expedition supported by the RV Pelagia sailing from Istanbul was to image the 3D structure of submarine flows passing through a rare example of an active submarine channel system in the Southeast Black Sea.

ALR in Burtonport – Burtonport, Donegal
In February 2014, the team travelled to a wet and windy Burtonport in Donegal to prepare the ALR for deployment as part of the NERC Fastnet science programme.

Loss and return of Autosub 3 – Celtic Sea
It was not possible to complete the first of two Benthic NERC Shelf Seas Biogeochemistry cruises due to the temporary loss of Autosub 3. An immediate post-mission search began, and an estimated position of the AUV was found from its emergency beacon.

First UK Visit to Clarion Clipperton Zone – Northern Equatorial Pacific
This cruise was the first UK science expedition to the Clarion Clipperton Zone (CCZ) in the northern equatorial Pacific, an area of interest for deep-sea mining for polymetallic nodules. In particular, the cruise visited the north easternmost Area of Particular Environmental Importance (APEI).

Canyon Surveys – Whittard Canyon
Autosub6000 was aboard the RRS James Cook alongside the Isis ROV as part of the ERC CODEMAP project led by Dr Veerle Huvenne. The cruise objectives were to survey and sample the Whittard Canyon system with the ship, AUV and ROV all providing different pieces of the puzzle.

Seafloor Imagery – Mid-Atlantic Ridge
Aboard the RRS James Cook, this cruise was primarily focused on acquiring the active-source geophysical data and seafloor imagery to complement the passive recordings of microseisms made by 25 ocean-bottom seismographs (OBS).

Commencement of Oceanids – National Oceanography Centre
June 2016 saw the commencement of the Oceanids Programme, a £16 million Marine Autonomous Systems (MAS) development programme funded by UK Government as part of the Industrial Strategy Challenge Fund (ISCF).

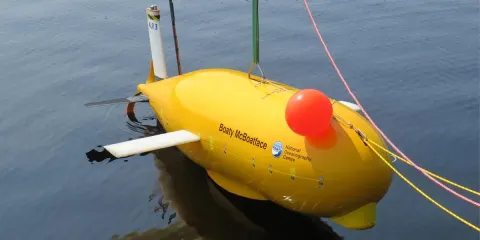
Boaty’s First Mission – Scotia Sea, Antarctic
In June 2017, The RRS James Clark Ross arrived at the NOC, returning Autosub Long Range (ALR), ‘Boaty McBoatface’ home after its first scientific deployment in the Antarctic. Supported by NOC engineers, the team collected data on temperature, speed of water flow and underwater turbulence rates.

Epic Antarctic Adventures – Weddell Sea, Antarctic
From January to February 2018, the Autosub Long-Range, ‘Boaty McBoatface’ was deployed in the southern Weddell Sea during the RV Polarstern cruise PS111 as part of the Filchner Ice Shelf System (FISS) Project – a collaboration involving leading UK research institutions.

ALR1500 Harbour Acceptance Trials – Portland Harbour, Dorset
The latest Autosub Long Range vehicle (ALR4) being developed under the NERC Oceanids programme successfully completed its first live trials in the waters of Portland Harbour in Dorset, in May 2019.

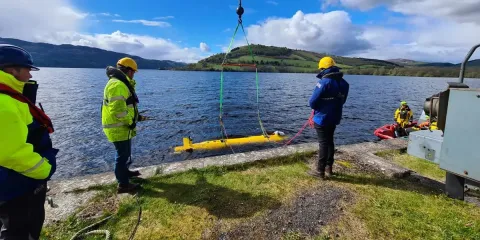
ALR Success at Loch Ness – Loch Ness, Scotland
Following the Portland trials, ALR1500’s next test was in the waters of Loch Ness, Scotland where two of the three new vehicles (ALR5 and ALR6) went through their first round of commissioning trials.

Coral Mounds Checkup – Darwin Mounds Marine Protected Area
Autosub6000 returned to the Darwin Mounds, an area of small cold-water coral mounds in the Northern Rockall Trough, which Autosub6000 had previously surveyed in 2011. These mounds, discovered by NOC scientists in 1998, are protected from bottom contact fishing.
Autosub Long Range (ALR) a key technology to deliver EU Horizon 2020
Funded by a €8.9 million grant from the European Union’s Horizon 2020 programme, TechOceanS – Technologies for Ocean Sensing – will pioneer five new sensors, two imaging systems, a novel sampler and an Artificial Intelligence-driven image processing methodology, all capable of robust operations at depths beyond 2,000 metres.
Autosub 5 Begins Harbour Acceptance Testing – Loch Ness, Scotland
In May, the Oceanids Autosub 5 (formerly Autosub2KUI) platform began its next phase of trials, in-water Harbour Acceptance Testing, in Loch Ness. These trials tested the new onboard control software, advanced navigation systems, and basic vehicle flight dynamics.
ALR Preparation for Thwaites – Loch Ness, Scotland
In July, the NOC engineering team were in Loch Ness, testing new vehicle navigation and avoidance software ready for the upcoming ALR science deployment under the Thwaites Glacier, Antarctica in early 2022.

Understanding Ice Loss
Autosub Long Range travelled over 40km under the Dotson Ice Shelf to measure currents, turbulence and other properties of the water temperature and salinity. The mission was initially meant to go to Thwaites Glacier, but thick and dense ice prevented it.

Net Zero Targets Established
In January 2022 the findings from a new review into the future of oceanographic research infrastructure revealed the significant changes that must be made to enable the UK to deliver a Net Zero Oceanographic Capability (NZOC).

Distance Record Broken
Over a period of five weeks the autonomous vehicle travelled from Plymouth out to the continental shelf edge south of Ireland and back to Plymouth, covering a distance of almost 2,000km while venturing to depths of over 1,000m.

Autosub 5’s Final Trial
This expedition saw the final commissioning trial of Autosub 5, Autosub6000’s replacement. The new work-class AUV is equipped with higher power sensors including state-of-the-art sonars and imaging systems that will enable scientists to create detailed maps and establish habitat characteristics of the seafloor.

Oil Field Surveys
Autosub Long Range began conducting research on end-of-life oil fields off the coast of the Shetland Islands to help monitor and protect the marine environment in the North Sea and to support industry transition towards its net-zero targets.
What Makes Operating in Challenging Terrain Difficult?
Submarine canyons, coral mounds, and other complex topography present significant challenges that make autonomous vehicle operations genuinely difficult. The terrain itself is often unpredictable, with steep slopes, overhangs, and irregular features that require sophisticated obstacle detection and quick decision-making. When you're trying to capture high-resolution imagery, you need to fly just metres above the seabed, which leaves little margin for error if something unexpected appears in your path.
Strong currents flowing through canyons and around topographic features can push vehicles off course, requiring constant compensation and adjustment. Underwater visibility is typically just a few metres even with advanced sensors, so the vehicles must rely on sonar and other instruments rather than cameras for real-time navigation. Perhaps most challengingly, underwater communication is severely limited, meaning vehicles must handle unexpected situations autonomously rather than asking for help. Autosub 5's successful operations in Whittard Canyon demonstrate how advances in obstacle avoidance and autonomous control are making these challenging environments accessible, but it remains genuinely difficult work that requires sophisticated systems and careful planning.
How do Autosubs Support Marine Conservation?
The capabilities Autosubs provide prove particularly valuable for understanding and protecting marine ecosystems. They can survey sensitive habitats like coral mounds without making physical contact or causing disturbance. The vehicles simply fly over these areas at carefully controlled altitudes, observing without touching. This non-invasive approach matters enormously in fragile environments where even well-intentioned research can cause damage.
The before-and-after monitoring of conservation measures, such as the trawling ban in Whittard Canyon, demonstrates how these vehicles contribute to evidence-based conservation. We can document what protected areas looked like before protection was introduced, then return months or years later to see whether ecosystems are recovering. The environmental DNA sampling capability captures genetic signatures of which species are present without physically sampling the organisms themselves, providing biodiversity information that would be difficult or impossible to gather through traditional survey methods. Beyond documenting current conditions, Autosubs help us quantify the physical and biological effects of human activities, whether from fishing, offshore development, or other impacts. The repeated surveys enable document ecosystem changes and recovery over years, creating the long-term records that separate genuine trends from natural variation.
What is Environmental DNA Sampling and Why Does it Matter?
Environmental DNA sampling represents a revolutionary shift in how we survey biodiversity. The concept is remarkably straightforward. Organisms constantly shed genetic material into their environment through skin cells, mucus, waste, and other biological processes. By collecting water samples and sequencing the DNA fragments we find there, we can identify which species are present without ever seeing or catching them. NOC's RoCSI sensor, which can be integrated into Autosub 5, enables these genetic surveys to be conducted by autonomous vehicles rather than requiring direct water sampling by researchers.
The advantages of this approach are substantial. It's completely non-invasive, eliminating concerns about disturbing or capturing organisms. The method proves remarkably comprehensive, detecting species that might easily be missed by visual surveys or traditional sampling methods. When deployed on an autonomous vehicle, eDNA sampling becomes highly efficient, covering large areas without requiring constant human supervision. The technique can detect rare or elusive species that appear infrequently or avoid areas with human presence. For assessing biodiversity in protected areas, detecting invasive species before they become established, and tracking how ecosystems change over time, environmental DNA provides information that would be difficult or impossible to gather through traditional methods. The technology transforms our ability to survey marine life whilst minimising our impact on the very ecosystems we're trying to understand.
How do Autosubs Fit Into NOC's Broader Research Strategy?
Rather than representing a separate research capability, Autosubs integrate into NOC's broader approach to ocean science in ways that strengthen the whole enterprise. They complement rather than replace research vessels, with ships providing essential platforms whilst autonomous vehicles extend what we can accomplish in terms of spatial coverage, temporal persistence, and access to challenging environments. The long-range and long-endurance capabilities support the sustained observations needed to understand ocean change, building datasets that span seasons and years rather than individual expeditions.
These vehicles directly support NOC's commitment to Net Zero Oceanographic Capability by enabling more carbon-efficient research approaches. They demonstrate UK leadership in marine robotics and autonomous systems, maintaining and extending capabilities that have been decades in development. The technology serves researchers across multiple disciplines, from marine biologists studying deep-sea ecosystems to geophysicists mapping seafloor structures. Perhaps most importantly, Autosubs help bridge the gap between what we want to know about the ocean and what we can practically observe, generating information that translates scientific understanding into solutions for real ocean challenges.

NOC's Ocean Vehicles
The Marine Autonomous and Robotics Systems (MARS) team at NOC designs, builds, and operates a world-class fleet of underwater robots, including Autonomous Underwater Vehicles (AUVs), Gliders, and Remotely Operated Vehicles (ROVs), to advance marine scientific research. The fleet is one of the largest and most advanced in the world, and alongside working with the research ships NOC operates the fleet explores some of the ocean's most remote areas.